Fast Low Earth Orbit Satellite Tracking using Micromotor Actuated Rotational Reconfigurable Antenna Arrays
Kenneth Holder, Siddhanta Panda, Christopher Saetia
-
Members: FreeRFID
IEEE Members: $11.00
Non-members: $15.00Length: 00:16:49
27 Apr 2021
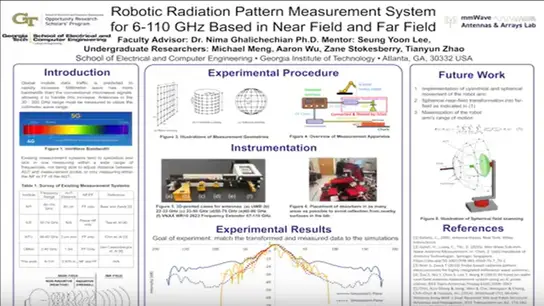
Of the more than 2200 satellites orbiting the earth, most are positioned in Low Earth Orbits (LEO) with extremely large angular velocities. The International Space Station, for example, orbits the earth in 90 min. Such an object stays within the Field of View of a particular point on earth for merely 3-5 min. In order to communicate with such satellites, the position of the satellite is tracked using certain algorithms such as the "Signal Based" and the "Program Based" methods [1]. The Signal and Program based methods of tracking are dead reckoning methods with a very high computational complexity and large margins of error. This creates challenges in the efficient communication or relay of messages and commands to LEO satellites. The rapid speed with which the satellites move across a ground RADAR's Field of View makes it extremely difficult to accurately predict and track a satellite as it moves along the sky, and present day trackers usually lag or show significant deviations from the actual satellite position. Satellite trackers typically compensate by spreading a high power beam over a larger solid angle, which leads to huge power wastage as well. The present effort proposes a Control Architecture for a system comprising of antenna arrays, motor controls and computer systems with fast interconnects for efficient and quick prediction of the position of a satellite along with sensors to handle feedback in order to reduce sensitivity to disturbances. Rotational Reconfigurable Antennas (RRAs) [2] prove to be extremely efficient in both producing narrow band beams in specific directions, and in simplifying the hardware required for transmitting and receiving signals. They serve as efficient abstractions of the traditional Phased Antenna Arrays. A time varying trajectory tracker algorithm has been proposed for the plant comprising of servo motors actuating RRA cells to produce beams having accurate azimuth and elevation throughout the time a satellite stays in the RRA array's field of view. The system was found to be controllable, observable and commandable and the proposed trajectory tracker behaves as though the disturbance is the only input to the overall system. Further prospects for optimal control using the Pareto Optimal Curve and Tichonov Regularization will also be discussed. This project proposes a highly efficient, novel and low cost method for tracking fast moving satellites using RF transmission and reception with minimum number of moveable parts and hence involves minimal energy dissipation compared to the traditional tracking systems. It also demonstrates a proof of concept and a basic embedded system set up with Servo Motors and RRA cells fabricated at the Interdisciplinary Design Commons. It is therefore highly relevant as an exploratory research field at the IEEE RFID Conference. This poster outlines work conducted as part of the year long Opportunity Research Scholars Program at Georgia Tech in collaboration with Viasat. It delineates the prototype of the satellite tracker and the underlying principles for optimal positioning of the beam. It also demonstrates potential optimization algorithms we shall be implementing as part of future work involving deploying a working prototype for Viasat. The authors believe that this novel method for efficient low cost LEO Satellite tracking can benefit from such a platform as the conference. References [1] A. Khanlari and F. MansourKiaie, "A new efficient algorithm for tracking LEOsatellites," 2013 IEEE International Systems Conference (SysCon), Orlando, FL, pp. 587-590,IEEE RFID 2021: Program 5/10/21, 11:06 AM https://edas.info/web/ieeerfid2021/program.html Page 3 of 21 2013. [2] X. Yang et al., "A Broadband High-Efficiency Reconfigurable Reflectarray Antenna Using Mechanically Rotational Elements," IEEE Trans. Antennas Propagat., vol. 65, no. 8, pp. 3959-3966, Aug. 2017.